新鲜 / 健康 / 便利 / 快速 / 放心

apollo路径规划quadratic programming 的方法采用piecewise_jerk_path_optimizer的实现方式,详细可参考论文《Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform》
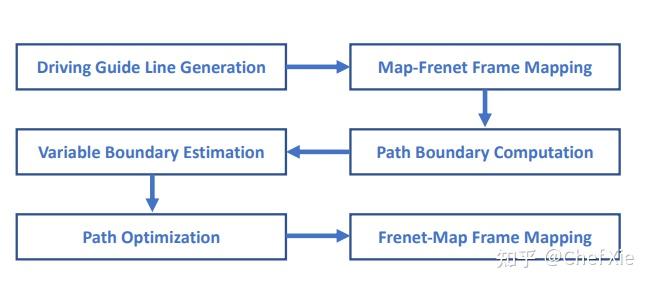
论文中清晰的给出apollo6.0之后的路径优化的思路,即首先生成平滑的引导线或者参考线,然后把地图坐标系下道路的边界投影到Frenet坐标系下得到相应的s,l值,并计算出Frenet坐标系下的道路边界,作为后续优化问题的边界条件。最后把经过优化后的s,l,l',l''信息输出到笛卡尔坐标系或者地图坐标系下得到x,y值。
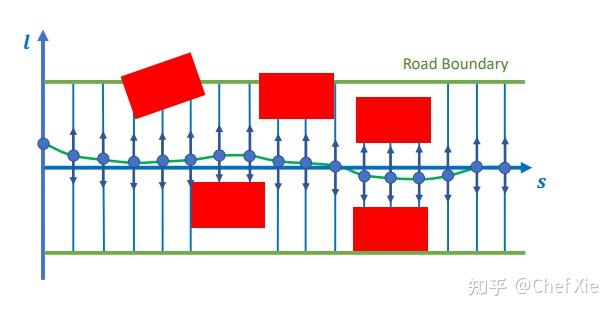
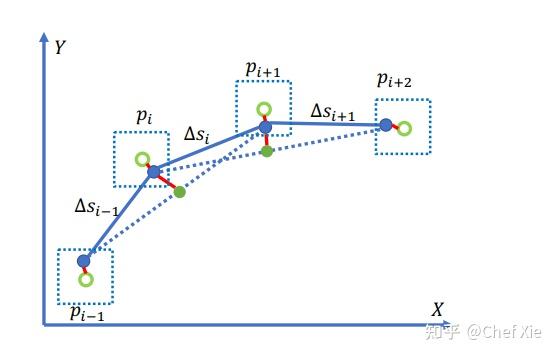
apollo的此项路径规划是在Frenet坐标系下进行优化,如图,图中居中的蓝色线为引导线,生成的圆点为离散后经过PJPO(Piecewise Jerk Path Optimizer)优化后获得的frenet坐标系下的s,l点。
除去apollo已有的优化方法以及约束条件,本文创造性的提出使用车辆运动学模型对道路的边界条件l进行约束。文后展开说明。
论文第二,三部分:除去引用论文以及当前的研究进展,主要通过下图阐述,车辆的方向盘转角α与车辆行驶轨迹半径之间的关系,即 ,其中L为车辆的轴距,α为车辆的方向盘转角,R为车辆当前轨迹点的半径。由于半径与曲率互为导数,因此引进车辆行驶轨迹k(与转向角阿尔法关联)作为状态量进行优化,如下图。因此需要对此图中的四个变量进行优化,分别为横坐标x,纵坐标y,航向角θ,轨迹曲率k。
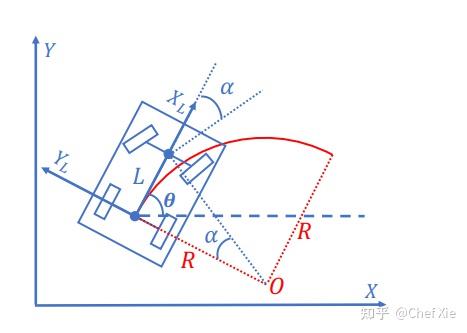
上述待优化变量需要满足,无碰撞风险,符合车辆运动学,舒适性等约束条件。
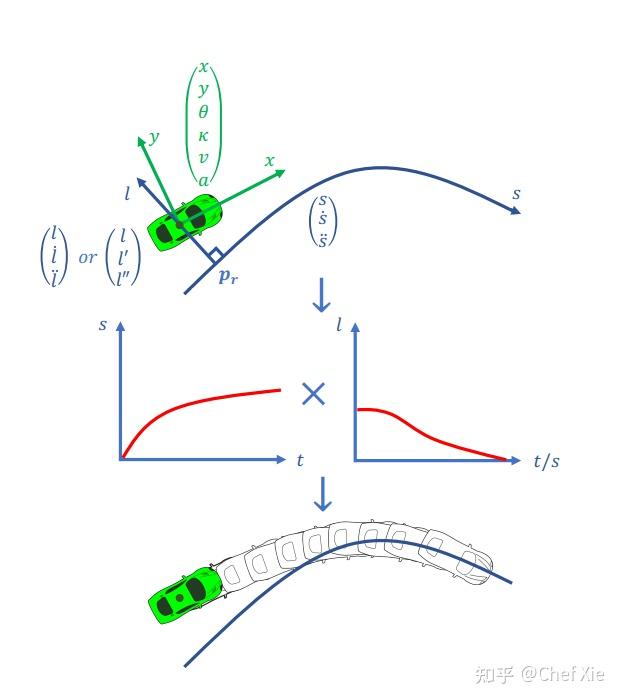
apollo对车辆的运动规划通常是在frenet坐标系下进行求解的,相关frenet坐标系的介绍可自行查阅相关文档。
如下图,笛卡尔坐标系下的车辆的变量在frenet坐标系下的变量示意。
第四部分:参考线的优化,参考线作为连接笛卡尔坐标系到Frenet坐标系的桥梁,他的曲率必须是连续的。并且需要考虑以下几个方面的因素,贴合中心线行驶(apollo),平滑性。此论文采用QP的方法对参考线进行平滑处理,此部分内容后续展开说明。
论文第五六部分:路径规划与优化,此处终于涉及到本论文的核心部分,道路的边界决策与生成。在apollo中涉及到decider模块去进行凸空间的构造,从而使得path的优化是为凸优化问题。
道路利用的决策,此处采用的以交通规则为基础的行为树模型进行决策,论文未展开。
道路边界的生成,此步骤的主要目的是基于上一步的决策方案,基于车辆的当前位置与周围障碍物的条件下进行道路边界的确定。先对s方向进行离散化,然后跟随引导线进行s方向上的搜索。当si点处无障碍物的时候,道路的边界直接便视为横向边界。如果低速或者静态障碍物出现在道路点si,我们通过beam-search的方式进行bypassing方向的搜索,然后基于当前的方向进行随后的sj点的计算从而获得后续的路径,若在此过程中中途失败,则回溯到当前位置进行新的方向搜索。另外,特别注意,动态的或者高速的障碍物不会在此路径规划涉及。主要在速度规划中涉及。此处会基于纵坐标s作为输入,计算出道路的边界作为后续路径规划的边界条件进行约束。
路径规划:
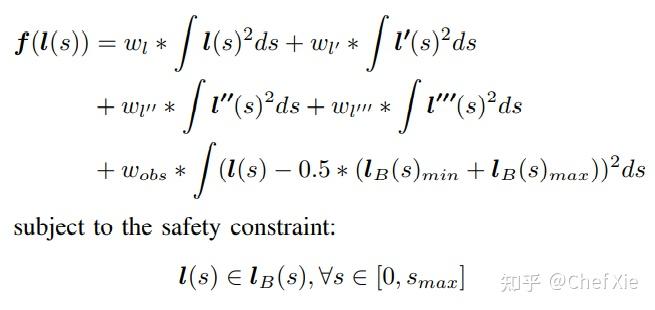
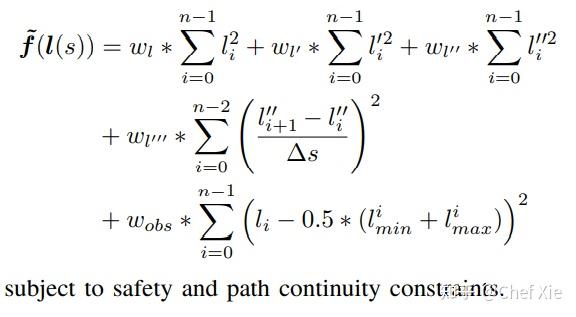
此处在上方给出道路边界lB的基础上,对路径进行二次规划。二次规划的目标函数需要考虑如下因素:1.无碰撞。2.最小横向位移,l。3.最小横向运动特性,dl,ddl。4.距离障碍物的距离较远(可选)。因此论文中的某点处的目标函数如下:
此处apollo采用状态方程如下图所示,l的三阶导数,dddl可通过二阶导差分的方式获取。

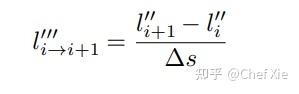
横向位置的l三阶导数如下图所示,
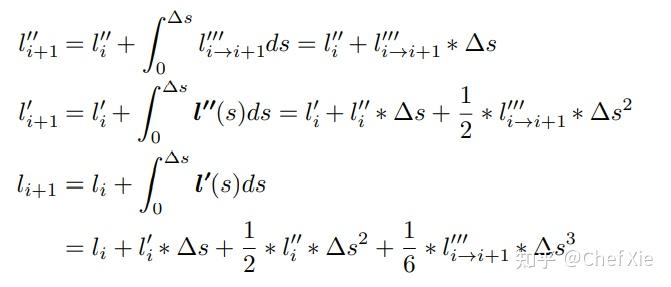
另外,为考虑path的连续性下方的l,l',l''等式约束需要考虑到约束条件中,如下图,
整个过程的路径规划的目标函数为:
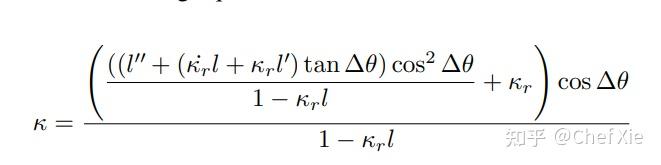
可变的道路边界对车辆运行学约束,道路曲率的等式约束如下,kr,kr_dot为当前点的曲率参数,△θ为车辆的航向角与当前点曲率的差值。
对上述等式进行近似计算,△θ=0,l''≈0,近似后的等式如下:
结合车辆运动学参数相关的最小转弯半径公式
最终我们可得到l的线性边界条件如下:

最终论文所演示的效果如下:
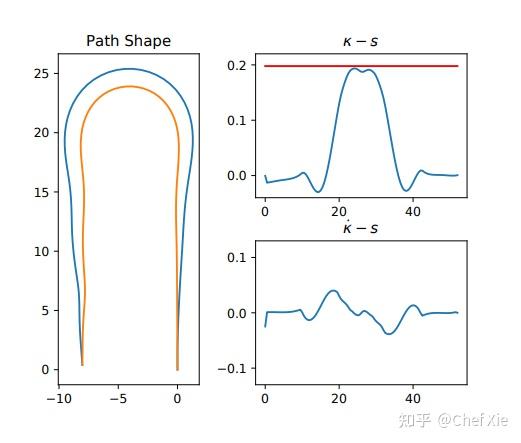
上图橙色的引导线最大转向半径为0.25m,大于论文车辆的0.2m。不符合车辆的运动学特性。优化后的轨迹的曲率以及曲率变化率都是连续的,规划出的蓝色路径与橙色的引导线芮然存在一定的偏差。但是更符合车辆运动学特性。另,APOLLO目前未在道路边界l处加入上述约束条件。
另外,后续更新相关算法的matlab或者Python的demo便于理解。
论文获取,百度云盘链接:
链接:https://pan.baidu.com/s/1D--WZaP5R33_g9dDdNtXwQ
提取码:4syv