新鲜 / 健康 / 便利 / 快速 / 放心

本文给出99行Matlab拓扑优化程序的流程图和注释供读者参考,后续会继续更新详细的解析,喜欢的朋友可以关注一下。
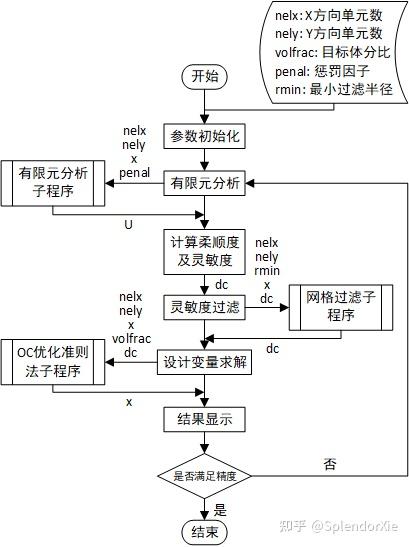
其中,除右上角输入的五个参数外,x为伪密度矩阵,U为位移矩阵,dc为灵敏度矩阵。
%%%% A 99 LINE TOPOLOGY OPTIMIZATION CODE BY OLE SIGMUND, JANUARY 2000 %%%
%%%% CODE MODIFIED FOR INCREASED SPEED, September 2002, BY OLE SIGMUND %%%
function top99(nelx,nely,volfrac,penal,rmin) %%(X方向单元数,Y方向单元数,目标体分比,惩罚因子,最小过滤半径)
% INITIALIZE(初始化)
x(1:nely,1:nelx) = volfrac; %%初始化伪密度矩阵x
loop = 0; %%初始化迭代次数
change = 1.; %%初始化循环控制条件(伪密度变化)
% START ITERATION(开始迭代)
while change > 0.01 %%当伪密度变化小于0.01时停止
loop = loop + 1; %%迭代次数+1
xold = x; %%储存当前密度值
% FE-ANALYSIS(有限元分析)
[U]=FE(nelx,nely,x,penal); %%调用有限元分析函数,返回整体位移矩阵U
% OBJECTIVE FUNCTION AND SENSITIVITY ANALYSIS(目标函数和灵敏度分析)
[KE] = lk; %%获取单元刚度矩阵KE,各单元均相同
c = 0.; %%初始化柔顺度
for ely = 1:nely
for elx = 1:nelx
n1 = (nely+1)*(elx-1)+ely; %%计算左上节点编号n1
n2 = (nely+1)* elx +ely; %%计算右上节点编号n2
Ue = U([2*n1-1;2*n1; 2*n2-1;2*n2; 2*n2+1;2*n2+2; 2*n1+1;2*n1+2],1); %%提取单元上各节点的位移
c = c + x(ely,elx)^penal*Ue'*KE*Ue; %%计算柔顺度
dc(ely,elx) = -penal*x(ely,elx)^(penal-1)*Ue'*KE*Ue; %%计算灵敏度
end
end
% FILTERING OF SENSITIVITIES(灵敏度过滤)
[dc] = check(nelx,nely,rmin,x,dc); %%调用网格过滤函数,返回过滤后的灵敏度
% DESIGN UPDATE BY THE OPTIMALITY CRITERIA METHOD(优化准则法求解)
[x] = OC(nelx,nely,x,volfrac,dc); %%利用优化准则法优化设计变量
% PRINT RESULTS(输出结果)
change = max(max(abs(x-xold))); %%更新伪密度变化
disp([' It.: ' sprintf('%4i',loop) ' Obj.: ' sprintf('%10.4f',c) ...
' Vol.: ' sprintf('%6.3f',sum(sum(x))/(nelx*nely)) ...
' ch.: ' sprintf('%6.3f',change )]) %%输出
% PLOT DENSITIES(绘制优化结果)
colormap(gray); imagesc(-x); axis equal; axis tight; axis off;pause(1e-6); %%绘图
end
%%%%%%%%%% OPTIMALITY CRITERIA UPDATE %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [xnew]=OC(nelx,nely,x,volfrac,dc)
l1 = 0; l2 = 100000; move = 0.2; %%初始化优化边界,设计变量单次变化最大范围
while (l2-l1 > 1e-4) %%收敛条件
lmid = 0.5*(l2+l1); %%取优化边界中点
xnew = max(0.001,max(x-move,min(1.,min(x+move,x.*sqrt(-dchttps://zhuanlan.zhihu.com/p/lmid))))); %%计算设计变量
if sum(sum(xnew)) - volfrac*nelx*nely > 0 %%边界收缩
l1 = lmid;
else
l2 = lmid;
end
end
%%%%%%%%%% MESH-INDEPENDENCY FILTER %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [dcn]=check(nelx,nely,rmin,x,dc)
dcn=zeros(nely,nelx); %%建立灵敏度矩阵
for i = 1:nelx
for j = 1:nely %%遍历各节点
sum=0.0; %%初始化有效区域内各节点到过滤边界的距离之和
for k = max(i-floor(rmin),1):min(i+floor(rmin),nelx)
for l = max(j-floor(rmin),1):min(j+floor(rmin),nely) %%遍历有效区域内各节点
fac = rmin-sqrt((i-k)^2+(j-l)^2); %%计算各节点到过滤边界的距离
sum = sum+max(0,fac); %%计算有效区域内各节点到过滤边界的距离之和
dcn(j,i) = dcn(j,i) + max(0,fac)*x(l,k)*dc(l,k); %%灵敏度加权叠加
end
end
dcn(j,i) = dcn(j,i)/(x(j,i)*sum); %%进行平均计算,完成灵敏度过滤
end
end
%%%%%%%%%% FE-ANALYSIS %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [U]=FE(nelx,nely,x,penal)
[KE] = lk; %%获取单元刚度矩阵KE,各单元均相同
K = sparse(2*(nelx+1)*(nely+1), 2*(nelx+1)*(nely+1)); %%创建整体刚度矩阵的稀疏矩阵
F = sparse(2*(nely+1)*(nelx+1),1); U = zeros(2*(nely+1)*(nelx+1),1); %%创建载荷及位移矩阵的稀疏矩阵
for elx = 1:nelx
for ely = 1:nely
n1 = (nely+1)*(elx-1)+ely; %%计算左上节点编号n1
n2 = (nely+1)* elx +ely; %%计算右上节点编号n2
edof = [2*n1-1; 2*n1; 2*n2-1; 2*n2; 2*n2+1; 2*n2+2; 2*n1+1; 2*n1+2]; %%计算单元上各节点的坐标
K(edof,edof) = K(edof,edof) + x(ely,elx)^penal*KE; %%组装总刚度矩阵
end
end
% DEFINE LOADS AND SUPPORTS (HALF MBB-BEAM)(半MBB梁载荷约束)
F(2,1) = -1; %%单元1第1个节点(全局节点号2)受Y轴负方向的力
fixeddofs = union([1:2:2*(nely+1)],[2*(nelx+1)*(nely+1)]); %%约束自由度,半MBB梁左端部X方向约束,右下角Y方向约束
alldofs = [1:2*(nely+1)*(nelx+1)]; %%全部自由度
freedofs = setdiff(alldofs,fixeddofs); %%未约束自由度=全部自由度-约束自由度
% SOLVING
U(freedofs,:) = K(freedofs,freedofs) \\ F(freedofs,:); %%计算未约束自由度位移
U(fixeddofs,:)= 0; %%约束自由度位移为0
%%%%%%%%%% ELEMENT STIFFNESS MATRIX %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function[KE]=lk
E = 1.; %%弹性模量
nu = 0.3; %%泊松比
k=[ 1/2-nu/6 1/8+nu/8 -1/4-nu/12 -1/8+3*nu/8 ...
-1/4+nu/12 -1/8-nu/8 nu/6 1/8-3*nu/8]; %%单元刚度矩阵的典型值
KE = E/(1-nu^2)*[ k(1) k(2) k(3) k(4) k(5) k(6) k(7) k(8)
k(2) k(1) k(8) k(7) k(6) k(5) k(4) k(3)
k(3) k(8) k(1) k(6) k(7) k(4) k(5) k(2)
k(4) k(7) k(6) k(1) k(8) k(3) k(2) k(5)
k(5) k(6) k(7) k(8) k(1) k(2) k(3) k(4)
k(6) k(5) k(4) k(3) k(2) k(1) k(8) k(7)
k(7) k(4) k(5) k(2) k(3) k(8) k(1) k(6)
k(8) k(3) k(2) k(5) k(4) k(7) k(6) k(1)]; %%单元刚度矩阵2. 注释后的程序代码
top99.m如有不当的地方,欢迎大家指正!